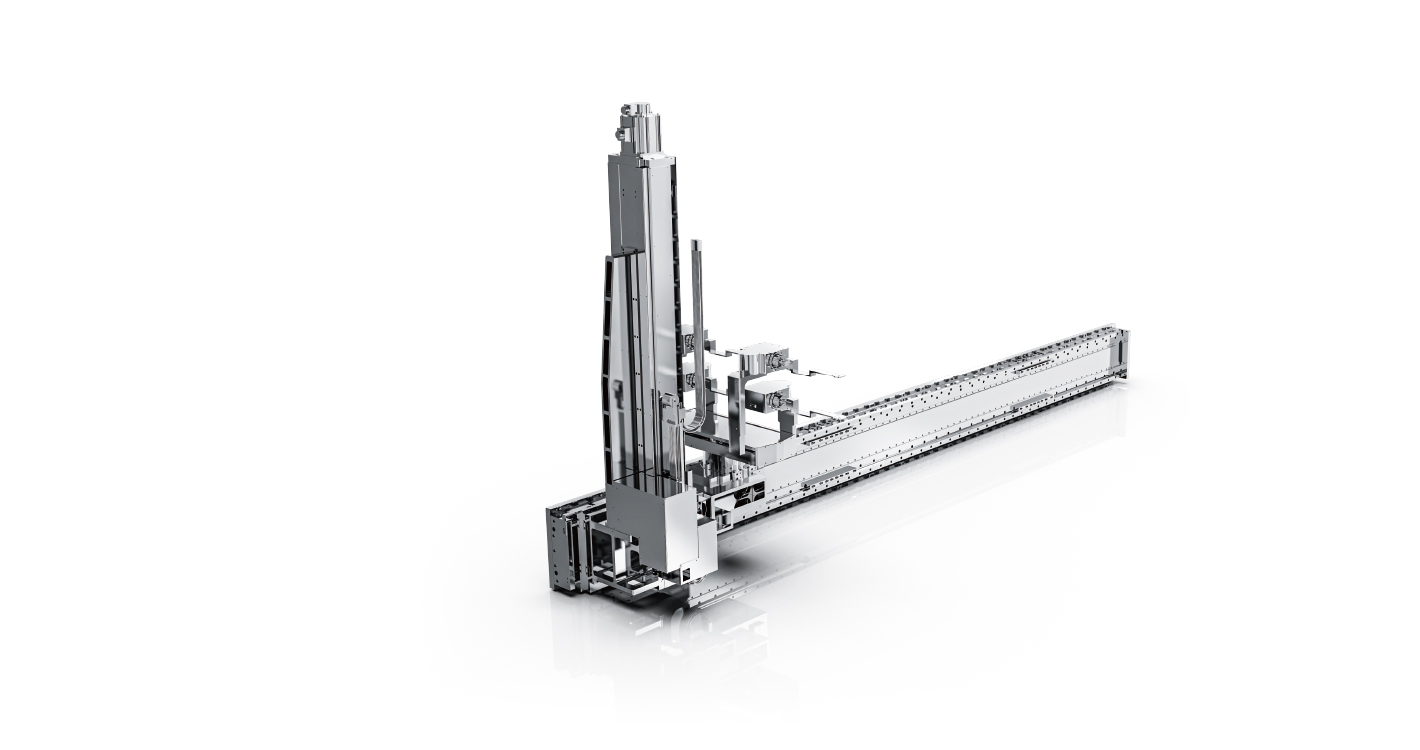
This robotic arm is designed for material handling in high-cleanliness conditions, employing a closed-loop servo control system, and is suitable for high-speed transfer operations.

The dual-arm configuration can achieve high-speed wafer transfer.
Using a dual Z-axis lifting structure, rapid lifting and lowering of the main body can be achieved within a high travel range.
Carrying capacity: Below 3Kg at the third joint of the arm.
Capable of being paired with different types of Forks to meet various wafer transfer requirements.
Wafer holding methods: Vacuum suction type/Clamping type/Clamping and lifting type/Contact Bernoulli type / Non-contact Bernoulli type.
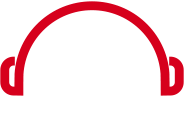
Based on the equipment layout, you can choose either an upper or lower fixing method.
| Handling Items | 3"/4"/6"/8"/12" Wafers | ||
| Movable Range (Arm Travel Distance) | Arm | Theta Rotation | Lifting: |
|
290/376mm |
340° |
300/400/500 | |
| Transfer Speed (Average Speed) | 750mm/S |
235~340°/S |
500mm/S |
| Arm Type | Dual Arms | ||
| Handling Height | 820-1020mm | ||
| Repeatability Accuracy | Within ±0.1mm | ||
| Communication Protocol | HEX/ASCII | ||
| Communication Method | EtherNet/RS232 | ||
| Cleanliness | Highest ISO Class 1 | ||
| Facility Requirements |
Power: 220V, 10A Vacuum: -70~-90Kpa Positive Pressure: 0.1~0.5Mpa |
Disclaimer: The appearance, specifications, performance descriptions, comparative data, and other information regarding the products displayed on this website are based on internal testing and experiments conducted in FORTREND’s laboratory. This information is for reference purposes only, and the final product may vary.
Copyright © FORTREND. Any commercial promotion of goods or services, whether directly or indirectly to consumers on this website, is considered 'advertising' (excluding product-related information such as packaging, specifications, and after-sales support)

.jpg)




二工位产品中心白底图1420x750.jpg)
二工位产品中心白底图1420x750.jpg)

.jpg)